パラレルCMM
パラレルメカニズムを用いた次世代
高速・高精度3次元座標計測システム
本研究では,従来の直交座標型(XYZ型)とは異なる三次元空間座標測定機(CMM)を提案しています.
このメカニズムでは直交座標型すなわちシリアルメカニズムの持っていた欠点を改善できるため,高剛性・高速度・高精度を実現できると考えられます.
図 本研究で提案するパラレルCMM
上の図は本研究室で提案するパラレルCMMの概略を示しています.三本のストラットの中にはストラットを伸縮させるアクチュエータと測長器を内蔵しています.プローブが被測定物に触れた瞬間の三本のストラットの長さからプローブの三次元座標が計算できます.
この提案する本方式では
1.測定点が測長ユニットの延長線上にあるため,精密測定の基本であるアッベの定理を満たしている
2.曲げモーメントのかかりにくいトラス構造で剛性が高く,大型化も容易である
3.各軸の移動・測定誤差が累積しない
4.積み重ね構造でないため,慣性質量を小さくでき,移動速度が高い
5.GPSなどと同じ三辺測量を近似的に用いて位置を測定するため,広い領域で高精度である
などの特長を持っています.
 試作機の歴史
試作機の歴史
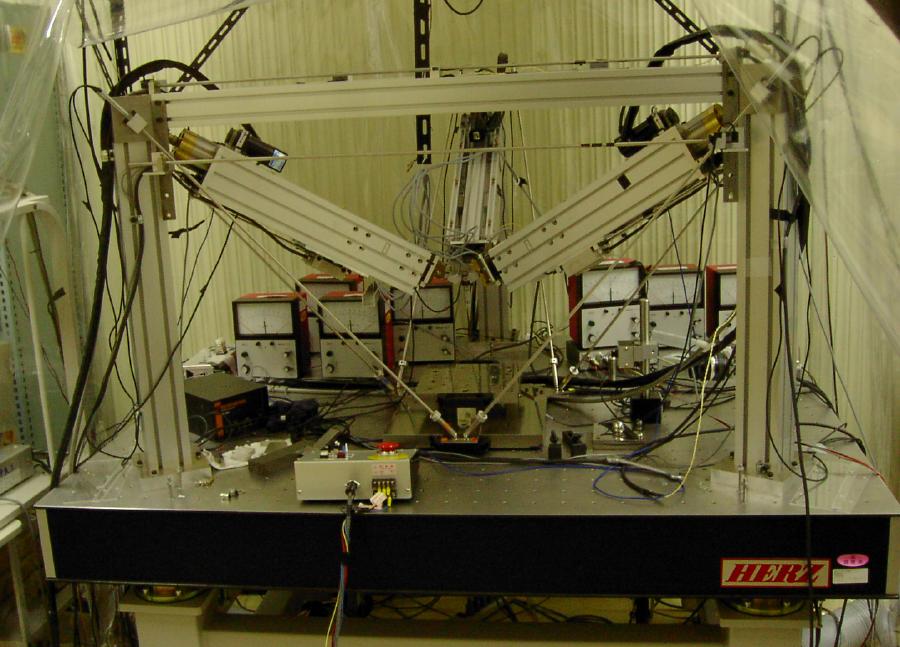
現在のパラレルCMM

図 本研究室で製作した,パラレルCMMです(H12.9~).

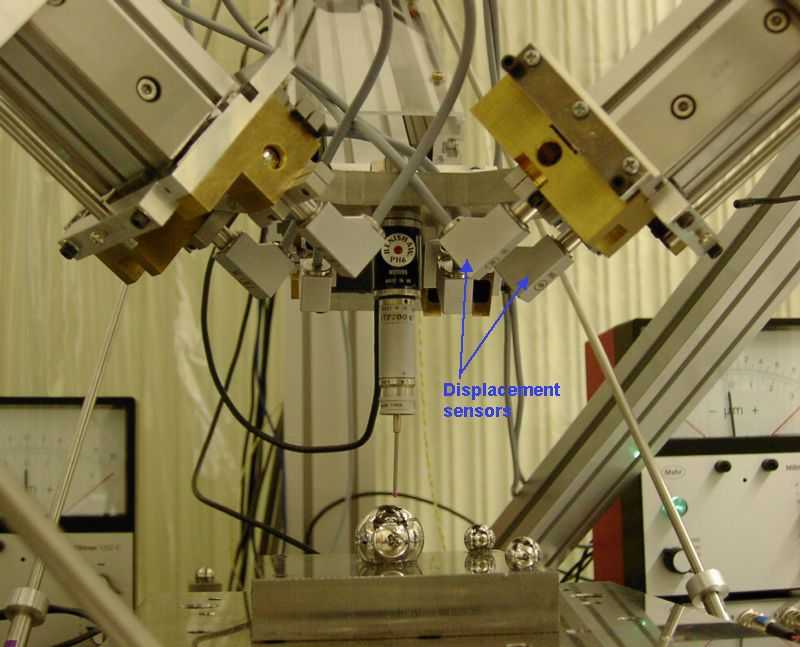
図 パラレルCMMのステージとプローブ回りを下から見た写真です.

図 ジョイントの運動誤差が測定誤差に与える影響を調査するための3自由度パラレルメカニズムです.
参考文献
(新しいものから並べてあります)
印刷論文
- 大岩孝彰,寺澤祐哉:パラレルメカニズム形機械のフレームの変形補正に関する研究, (アッベの原理に基づく補正装置の改良),日本機械学会論文集C編,79巻808号(2013-12)pp.5103-5116.
- T. Oiwa, H. Ikuma: A Calibration Method for a Six-degree-of-freedom Parallel Manipulator with a Redundant Passive Chain, Mechanisms and Machine Science, Vol. 17, New Advances in Mechanisms, Transmissions and Applications, Springer, 2013, pp-349-356.
- Takaaki Oiwa, Harunaho Daido and Junichi Asama: A Calibration Method for a Three-degrees-of-freedom Parallel Manipulator with a Redundant Passive Chain, Applied Mechanics and Materials, Vol. 162 (2012) pp 171-178.
- Takaaki Oiwa: Error Compensation System for Joints, Links and Mechine Frame of Parallel Kinematics Machines
International Journal of Robotics Research, Vol. 24, No. 12 (2005), pp. 1087-1102.
-
大岩 孝彰,首藤 圭一: パラレルメカニズムを用いた三次元座標測定機の校正に関する研究 ―冗長パッシブジョイントを用いたキャリブレーション―, 精密工学会誌,71,42(2005)pp.512-516.
-
大岩 孝彰,片岡 頼洋: パラレルメカニズムを用いた三次元座標測定機の校正に関する研究
―ダブルボールバーとタッチプローブを用いたキャリブレーション―,
精密工学会誌,69,2(2003)222-226.
- 大岩 孝彰,京極 正人,山口 浩希: パラレルメカニズムを用いた三次元座標測定機(第5報)
―立体的なボールプレートを用いたキャリブレーション―,
精密工学会誌,68,1(2002)65-69.
- 大岩 孝彰,馬場 周平: パラレルメカニズムを用いた三次元座標測定機(第4報)―試作機の開発―,
精密工学会誌,66,11(2000).
- 大岩 孝彰,山口 浩希: パラレルメカニズムを用いた三次元座標測定機(第3報)―アッベの原理―,
精密工学会誌,66,9(2000)1378-1382.
- 大岩 孝彰,久利 直道,馬場 周平: パラレルメカニズムを用いた三次元座標測定機(続報)―リンク配置の検討と誤差解析―,
精密工学会誌,65, 2(1999)288-292.
- 大岩 孝彰: パラレルメカニズムを用いた三次元座標測定機―基本原理と運動学―,
精密工学会誌,64, 12(1998)1791-1795.
- Takaaki OIWA: New Coordinate Measuring Machine Featuring a Parallel Mechanism,
International Journal of the Japan Society of Precision Engineering, 31, 3 (1997)232-233.
口頭発表
- 肥田拓也,大岩孝彰,寺林賢司,朝間淳一:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第29報)(校正点の配置が機構パラメータの推定精度に及ぼす影響),日本機械学会2017年度年次大会,S1110203,2017年9月3日~6日,埼玉大学
- 森 偉吹,大岩孝彰,寺林賢司,朝間淳一:3Dボールプレートを用いた3自由度パラレルメカニズムの機構校正,日本機械学会東海支部第66期総会・講演会講演論文集('17.3.14-15)No. 173-1 pp.216.(静岡大学浜松キャンパス)
- Ibuki MORI, Takaaki OIWA, Kenji TERABAYASHI and Junichi ASAMA:Kinematic calibration for three-degree-of-freedom parallel manipulator based on 3D-ball plate and touch probe, 16th International Conference on Precision Engineering(ICPE2016),Hamamatsu, Japan P04-8163.
- Ibuki MORI, Takaaki OIWA, Kenji TERABAYASHI and Junichi ASAMA: Parameter identification for coordinate measuring machine based on three-degree-of- freedom parallel manipulator, The 7th International Conference on Positioning Technology (ICPT 2016),Seoul, Korea, p49, Nov.8-11, 2016.
- 大岩孝彰,加藤浩介,寺林賢司,朝間淳一:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第28報)(冗長受動連鎖を用いた校正),日本機械学会第16回機素潤滑設計部門講演会,平成28年4月18~19日,グランディア芳泉(福井県あわら市)pp.39-40.
- Keita Otaki, Takaaki Oiwa, Junichi Asami and Kenji Terabayashi: Kinematic calibration for three-degree of freedom parallel manipulator based on doubleended ball bar and touch probe (P1-28MS), pp.288-292, The 6th International Conference on Positioning Technology ICPT2014, Nov. 18-21, 2014, Kitakyushu International Conference Center, Kitakyushu-shi, Fukuoka, Japan.
- 小里武史,大岩孝彰,寺林賢司,朝間淳一:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第27報)―3Dボールプレートを想定した校正シミュレーション―, 2014年度精密工学会春季大会学術講演会講演論文集, pp.1085-1086
- T. Oiwa and H. Ikuma: A calibration method for a six-degree-of-freedom parallel manipulator with a redundant passive chain, The Second Conference on Mechanisms,Transmissions and Applications(MeTrApp2013), Bilbao, Spain, October 2-4, 2013
- 大滝 啓太,大岩 孝彰,朝間淳一,寺林賢司:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第26報)(ダブルボールバーを用いた校正),日本機械学会2013年度年次大会講演論文集,S111043
- Harunaho Daido,*, Takaaki Oiwa,Kenji Terabayashi and Junichi Asama: Parameter Identification Based on for Three-
degree-of-freedom Parallel Mechanism a Redundant Passive chain, The 5th International Conference on Positioning Technology 2012,November 14-16, 2012,Garden Villa, Kaohsiung City, Taiwan
- 小里武史,大岩孝彰,朝間淳一: パラレルメカニズムを用いた高速・高精度3次元座標計測システム(フレーム変形補正とボールプレートを用いた校正, 日本機械学会2012年度年次大会講演論文集, S116053
- Takaaki Oiwa, Harunaho Daido and Junichi Asama:A Calibration Method for a Three-degrees-of-freedom Parallel
Manipulator with a Redundant Passive Chain,The Joint International Conference of the XI International Conference on Mechanisms and Mechanical Transmissions (MTM) and the International Conference on Robotics (Robotics’12) , pp. 652-656,IFMA, Clermond-ferrend, France
- (学)菅原 孝治,(学)○大道春直,大岩孝彰,朝間淳一: パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第24報)―キャリブレーション方法の検討―,2011年度精密工学会春季大会学術講演会講演論文集, 485-486.
- ○大岩孝彰,(学)池田竜也:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第23報)―冗長受動ジョイントを用いたキャリブレーション―,日本機械学会2009年度年次大会講演論文集, S1108-1-2.
- ○池田竜也(学),大岩孝彰:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第22報)―冗長受動ジョイントを用いたキャリブレーション―,日本機械学会2008年度年次大会講演論文集.
- 〇寺澤祐哉(学),大岩孝彰:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第21報)―冗長受動ジョイントを用いたキャリブレーション―,2007年度精密工学会春季大会学術講演会講演論文集, 701-702.
- ○大岩孝彰,寺澤祐哉(学):パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第20報)(フレーム変形補正装置の改良),日本機械学会2006年度年次大会講演論文集,143-144.
- 大岩孝彰,○波多野佑典:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第19報)―冗長受動ジョイントを用いたキャリブレーション―,2006年度精密工学会春季大会学術講演会講演論文集,pp.1197-1198(2006)
- ○大岩孝彰,寺澤祐哉:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第18報)フレーム変形補正装置の改良,日本機械学会2005年度年次大会講演論文集,電気通信大
 大岩 孝彰,○三木 崇史:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第17報)―冗長受動リンクを用いたキャリブレーション―,2005年度精密工学会春季大会学術講演会講演論文集,1115-1116
大岩 孝彰,○三木 崇史:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第17報)―冗長受動リンクを用いたキャリブレーション―,2005年度精密工学会春季大会学術講演会講演論文集,1115-1116
-
○大岩孝彰,伊藤晴信:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第16報)―リンクとフレーム変形の補正―<,日本機械学会2004年度年次大会講演論文集,北海道大学, Vol. 4,77-78.2004.9/5
-
大岩孝彰,○山下栄介:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第15報)―冗長受動リンクを用いたキャリブレーション―,2004年度精密工学会春季大会学術講演会講演論文集,2004,1319-1320.
-
大岩孝彰,首藤圭一:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第14報)―冗長受動リンクを用いたキャリブレーション―,2003年度精密工学会春季大会学術講演会講演論文集,3/26(2003)505.
-
大岩孝彰,大林祐介,山下栄介:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第13報)―フレーム変形の補正―,2002年度精密工学会秋季大会学術講演会講演論文集,(2002)237.
- 大岩 孝彰,片岡 頼洋:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第12報)―ダブルボールバーを用いたキャリブレーション―,2002年度精密工学会春季大会学術講演会講演論文集,(2002)
- 大岩 孝彰,首藤 圭一:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第11報)―ジョイント部の誤差の補正―,2001年度精密工学会秋季大会学術講演会講演論文集,(2001)pp. 558.
- 大岩 孝彰,山口 浩希:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第10報)―ボールプレートを用いたキャリブレーション―,2001年度精密工学会春季大会学術講演会講演論文集,(2001)3/28.
- 大岩 孝彰,山口 浩希:パラレルメカニズムを用いた三次元座標測定機の校正に関する研究,計測自動制御学会第8回静岡地区講演会講演論文集,(2000),53-55,12/11.
- T.Oiwa: Coordinate Measuring Machine using Parallel Mechanism,
Proc. 16th IMEKO World Congress, Sept. 25-28, 2000, Wien, Austria, Vol.8, pp211-214.
- T.Oiwa: Coordinate Measuring Machine using Parallel Mechanism,
Proc. Int. Conf. MECHATRONICS 2000, Sep. 21-23, Warsaw, Poland, Vol. 2, 423-426.
-
大岩 孝彰,京極 正人,山口 浩希:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第9報)―実機のキャリブレーション―,
2000年度精密工学会春季大会学術講演会講演論文集,(2000),3/23
- 大岩 孝彰,京極 正人:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第8報)―最小自乗法によるキャリブレーション―,
精密工学会九州支部沖縄地方学術講演会講演論文集,(1999),12/4
- 大岩 孝彰,京極 正人:パラレルメカニズムを用いた三次元座標計測機の開発,
精密工学会第4回知能メカトロニクスワークショップ講演論文集,(1999).
-
Takaaki OIWA: New coordinate measuring machine featuring a parallel mechanism,
1st International Conference of the European Society for Precision Engineering and Nanotechnology, May 31-June 4, (1999).
-
大岩 孝彰,山口 浩希:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第7報)―誤差解析とアッベの原理―,
1999年度精密工学会春季大会学術講演会講演論文集,(1999)97.
-
大岩 孝彰,馬場 周平,京極 正人:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第6報)―実機のキャリブレーション―,1999年度精密工学会春季大会学術講演会講演論文集,(1999)191.
-
大岩 孝彰,馬場 周平,京極 正人,松田 孝:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第5報)―実機の製作―,
1998年度精密工学会秋季大会学術講演会講演論文集,(1998).620
- パラレルメカニズムを用いた3次元座標計測システム,日本機械学会ロボティクス・メカトロニクス講演会’98講演論文集,1AII2-7, 1998.
- 大岩 孝彰,久利 直道,馬場 周平,松田 孝:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第4報)―機構パラメータの推定―,1998年度精密工学会春季大会学術講演会講演論文集,(1998)405.
- 大岩 孝彰,高野 雅士,久利 直道,馬場 周平,松田 孝:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第3報)
―アッベの原理とパラレルメカニズム―,1998年度精密工学会春季大会学術講演会講演論文集,(1998)404.
-
大岩 孝彰:測定機器としてのパラレルメカニズム,1997年度精密工学会秋季大会学術講演会シンポジウム資料,(1997)30-33.
-
大岩 孝彰,久利 直道,馬場 周平:パラレルメカニズムを用いた高速・高精度3次元座標計測システム(第2報)
―リンク配置の最適化設計―,1997年度精密工学会春季大会学術講演会講演論文集,(1997)789.
-
大岩 孝彰,久利 直道:パラレルメカニズムを用いた
高速・高精度3次元座標計測システム,1996年度精密工学会秋季大会学術講演会講演論文集,(1996)677.
大岩研究室のホームページへ
Copyright (C) 1997 OIWA Laboratory All Rights Reserved.