PARALLEL CMM
Coordinate Measuring Machine using Parallel Mechanism
This study proposes a new coordinate measuring machine (CMM) based on a three-degree-of-freedom parallel manipulator. The proposed CMM has a number of advantages over the conventional CMM which uses an XYZ mechanism consisting of three mutually orthogonal slide mechanism. New PARALLEL CMM will improve the stiffness, accuracy and efficiency of the CMM.
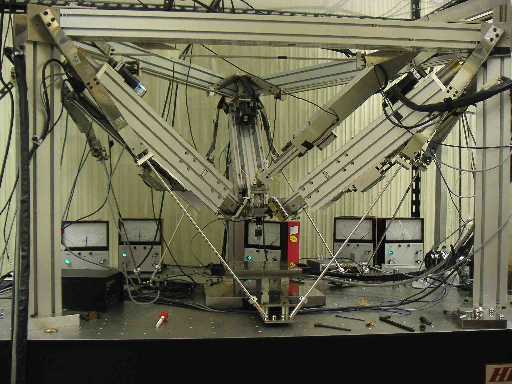
FIg. This CMM is based on 3-DOF 3-SPR Parallel manipulator.

This is a prototype of "PARALLEL CMM". This CMM employs an aluminum truss frame with a compensation system for thermal and elastic deformations. Moreover, this 3 DOF parallel kinematic mechanism has a compensation system for joint runout and thermal and elastic deformation of the links. If you are interested in ths compensation system, see this page.
(Click the photo for larger one)

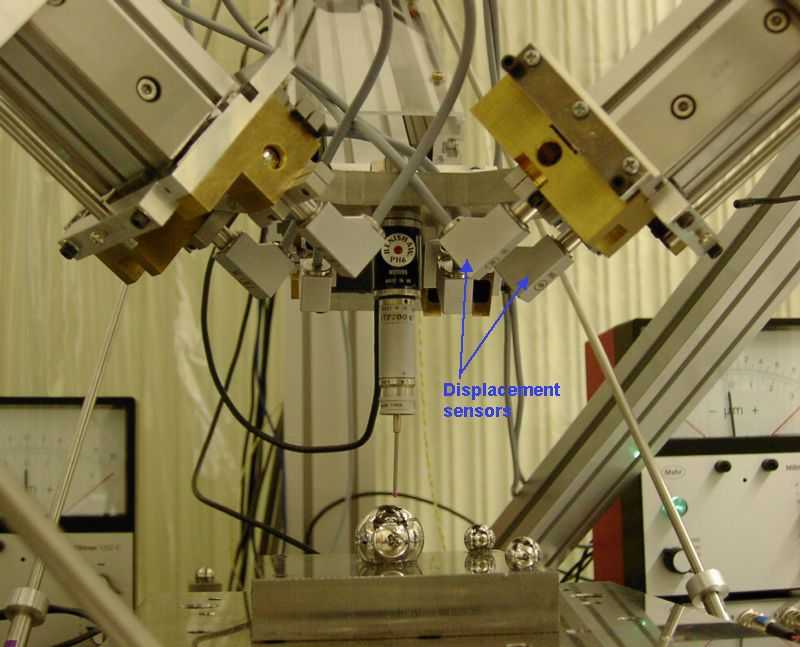
This is a photo around the the moving platform with a touch trigger probe and some displacement censers. You can see some displacement sensors for measuring the joint runouts.(Click the photo for larger one)
References
Papers
- Takaaki OIWA and Yuuya TERASAWA: Compensation System for Machine Frame Deformations of Parallel Kinematic Machine (Abbe's principle-based Improvement of compensation device), Transactions of the Japan Society of Mechanical Engineers, Vol. C79, No. 808 (2013) 5103-5116 (in Japanese).
-
Takaaki Oiwa, Harunaho Daido and Junichi Asama: A Calibration Method for a Three-degrees-of-freedom Parallel Manipulator with a Redundant Passive Chain, Applied Mechanics and Materials, Vol. 162 (2012) pp 171-178.

- Takaaki OIWA: Review for Special Issue on Parallel Structures in Manufacturing and Robotics: Precision Mechanisms Based on Parallel Kinematics, International Journal of Automation Technology, Vol. 4, No. 4 (2010) pp. 326-337.
-
Takaaki OIWA:
Error Compensation System for Joints, Links and Mechine Frame of Parallel Kinematics Machines,
International Journal of Robotics Research, Vol. 24, No. 12 (2005), pp. 1087-1102.
- Takaaki OIWA and Keiichi SHUTOH: A Calibration Method
for Coordinate Measuring Machine using Parallel Mechanism -
Calibration with Redundant Passive Prismatic Joint-, J. Jpn.
Soc. Precision Engineering, Vol. 71, No. 4 (2005) pp.512-516
(in Japanese).
-
Takaaki Oiwa and Yorihiro Kataoka:
A Calibration Method for Coordinate Measuring Machine using Parallel Mechanism
-Calibration with Double Ball Bar and Touch Trigger Probe-,
J Jpn. Soc. Precision Enginnering, Vol.69, No.2 (2003) pp.222-226(in Japanese).
-
Takaaki OIWA and Shuhei BABA:
Coordinate Measuring Machine using Parallel Mechanism (4th Report)-Development of Trial Measuring Machine-,
Journal of the Japan Society of Precision Engineering, 66, 11 (2000) 1711-1715(in Japanese).
-
Takaaki OIWA and Kouki YAMAGUCHI:
Coordinate Measuring Machine using Parallel Mechanism (3rd Report)
-Abbe's Principle-,
Journal of the Japan Society of Precision Engineering, 66, 9 (2000) 1378-1382(in Japanese).
-
Takaaki OIWA, Naomichi KURI and Shuhei BABA:
Coordinate Measuring Machine using Parallel Mechanism,
-Link layout Design and Error Analysis-,
Journal of the Japan Society of Precision Engineering, 65, 2 (1999) 288-292(in Japanese).
-
Takaaki OIWA: New Coordinate Measuring Machine using Parallel Mechanism
-Fundamentals and Kinematics-,
Journal of the Japan Society of Precision Engineering, 64, 12 (1998) 1791-1795(in Japanese).
-
Takaaki OIWA: New Coordinate Measuring Machine Featuring a Parallel Mechanism,
International Journal of the Japan Society of Precision Engineering, 31, 3 (1997). 232-233.
Proceedings
- Harunaho Daido, Takaaki Oiwa, Kenji Terabayashi and Junichi Asama: Parameter Identification Based on for Three-
degree-of-freedom Parallel Mechanism a Redundant Passive chain, The 5th International Conference on Positioning Technology 2012, November 14-16, 2012,Garden Villa, Kaohsiung City, Taiwan
- Takaaki Oiwa, Harunaho Daido and Junichi Asama: A Calibration Method for a Three-degrees-of-freedom Parallel Manipulator with a Redundant Passive Chain, The Joint International Conference of the XI International Conference on Mechanisms and Mechanical Transmissions (MTM) and the International Conference on Robotics (Roboticsüf12), Vol. 162 (2012) pp 171-178, 2012.6/6-6/8, IFMA, Clermond-ferrend, France
- Tatsuya Ikeda and Takaaki Oiwa: Parameter Identification for Three-degree-of-freedom Parallel Mechanism -Kinematic Calibration with a Redundant Passive Prismatic Joint-, The 3rd International Conference on Positioning Technology 2008, 259-260, 2008.11, Congress Centre, Hamamatsu, Shizuoka, Japan, 2008.11.27
- Yasutomo Yamamoto and Takaaki Oiwa: A Calibration Method for Coordinate Measuring Machine Based on Parallel Mechanism -Parameter Identification with Ball Palte-, The 3rd International Conference on Positioning Technology 2008, 205-206, 2008.11, Congress Centre, Hamamatsu, Shizuoka, Japan, 2008.11.27
- üøT.Miki and T.Oiwa: Coordinate Measuring Machine using Palallel Machinism -kinematic Cabiration witu redundant Passive Link-, 1st International conference of Positioning Techonology, pp.431-432, 2004
- Takaaki OIWA: Accuracy Improvement of Parallel Kinematic Machine-Error Compensation Methods for Elastic and Thermal Deformations of Joints, Links and Machine Frame, The 6th International Workshop of the Department of Mechanical Sciences and Engineering
, 33-38 2003.
- Takaaki OIWA: Accuracy Improvement of Parallel Kinematic Machine, The euspen International Topical conference 2003 on Precision Engineering, Micro-Technology, Measurement Techniques and Equipment, Vol.1, pp.125-128. 2003
-
 Takaaki OIWA: Study on Accuracy Improvement of Parallel Kinematic Machine
(Compensation Methods for Thermal Expansion of Link and Machine Frame),
The 1st Korea-Japan Conference on Positioning Technology (CPT2002),
Takaaki OIWA: Study on Accuracy Improvement of Parallel Kinematic Machine
(Compensation Methods for Thermal Expansion of Link and Machine Frame),
The 1st Korea-Japan Conference on Positioning Technology (CPT2002),
-
Takaaki OIWA: Accuracy Improvement of Parallel Kinematic Machine
-Error Compensation System for Joints, Links and Machine Frame-,
6th International Conference on Mechatronics Technology (ICMT2002),
September 29 - October 3, 2002, Kitakyushu, JAPAN,pp433-438.
-
T.Oiwa: Coordinate Measuring Machine using Parallel Mechanism,
Proc. 16th IMEKO World Congress, Sept. 25-28, 2000, Wien, Austria, Vol.8, pp211-214.
-
T.Oiwa: Coordinate Measuring Machine using Parallel Mechanism,
Proc. Int. Conf. MECHATRONICS 2000, Sep. 21-23, Warsaw, Poland, Vol. 2, 423-426.
-
Takaaki OIWA: New Coordinate Measuring Machine featuring a Parallel Mechanism,
Proc. of 1st enternational conference of EUSPEN, Vol 2, (1999) 320-323.
-
Takaaki OIWA at el.:
Advanced Coordinate Measuring Machine using Parallel Mechanism,
Proc. JSPE autumn meeting, Mito, Japan , 1996.(in Japanese)
Return to Oiwa Lab. Home Page
Copyright (C) 1997 OIWA Laboratory All Rights Reserved.