パラレルメカニズムにおけるアッベの原理に関する研究
Abbe's principle in Parallel kinematics
従来の直交座標型工作機械や測定機では,加工点や測定点をすべての測長ユニットあるいは駆動ユニットの延長線上に配置することが困難であった.つまり精密機械や測長機の基本原理であるアッベの原理を満たしていないため,加工精度や測定精度がメカニズムの対偶部の運動誤差の影響を受けやすかった.これに対して,パラレルメカニズム型工作機械や測定機では,加工点や測定点を測長・駆動ユニットの延長線上近くに配置することが可能である.筆者らは空間3自由度パラレルメカニズムを用いた三次元座標測定機の研究において,以下のような結果を得ている.
- ジョイントの回転誤差の測長ユニット方向成分はメカニズムの運動精度に大きく影響を及ぼす.
- 測長ユニット方向以外の誤差成分の影響は小さく,特に測定点が測長ユニット延長線上にある場合は微小である.
- 運動誤差はジョイントの姿勢誤差の大きさと,測長ユニット延長線と測定点の距離に比例する.
- 試作機を用いた繰返し測定結果から,測定点が測長ユニット延長線上に近い場合に,測定値のばらつきが小さい.
つまり,通常の一次元の測長機におけるアッベの原理と同様に,測定点をスケール延長線上に置くことにより,ジョイントのガタや回転誤差などによる運動誤差が生じても,測長ユニット方向への成分が二次的誤差となり,測定値への影響が最小になる.
本研究では,より一般的な直動型の能動ジョイント6組を持つ6自由度のヘキサポッド機構において,メカニズムの運動誤差の主原因と考えられる球面ジョイントの回転誤差が機構の運動誤差に及ぼす影響を調べるため,微小運動学を用いた誤差解析を行い,影響の少なくなるリンク配置を検討する.
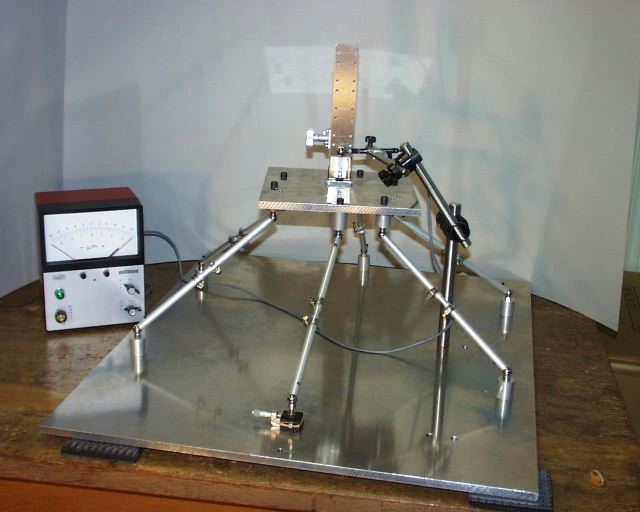
実験装置の数々

リンクを連結しているジョイントの回転誤差がメカニズムの運動誤差に及ぼす影響を調べるための簡易型のヘキサポッド機構です.(H10ごろ)
Simple Hexapod machanism for study on the effect of run-out of spherical joint on mechanism motion error.
参考文献
(新しいものから並べてあります)
投稿論文
 大岩 孝彰,玉木 雅人
大岩 孝彰,玉木 雅人
6自由度パラレルメカニズムにおけるアッベの原理に関する研究
(対偶の回転誤差が機構の運動誤差に及ぼす影響),
日本機械学会論文集C編69,678(2003)472-477.
口答発表

大岩孝彰,玉木 雅人
6自由度パラレルメカニズムにおけるアッベの原理に関する研究
日本機械学会第3回機素潤滑設計部門講演会(2003)4/21-22.
大岩 孝彰,玉木 雅人
6自由度パラレルメカニズムのリンク配置に関する研究
2001年度精密工学会春季大会学術講演会講演論文集,(2001)3/28.
大岩 孝彰,玉木 雅人
6自由度パラレルメカニズムのリンク配置に関する研究
計測自動制御学会第8回静岡地区講演会講演論文集,(2000),50-52,12/11.
大岩 孝彰,玉木 雅人
パラレルメカニズムにおけるジョイントの回転誤差が運動誤差に及ぼす影響
2000年度精密工学会秋季大会学術講演会講演論文集,(2000)247,10/8.
大岩 孝彰,玉木 雅人
パラレルメカニズムにおけるアッベの原理に関する研究
1999年度精密工学会秋季大会学術講演会講演論文集,(1999).
大岩 孝彰,玉木 雅人
パラレルメカニズムにおけるアッベのオフセットが運動誤差に及ぼす影響
日本機械学会第1回生産加工・工作機械部門講演会講演論文集,(1999)201-202.
大岩 孝彰,大多和 毅,松田 孝
パラレルメカニズムを用いた6自由度精密運動機構
(第3報)―試作機と運動精度―
1999年度精密工学会春季大会学術講演会講演論文集,(1999)95.
大岩 孝彰,平野 正和,大多和 毅,松田 孝
パラレルメカニズムを用いた6自由度精密運動機構
(第2報)―リンク配置と剛性―
1998年度精密工学会春季大会学術講演会講演論文集,(1998)406.
大岩 孝彰,平野 正和,宮嶋 俊裕
パラレルメカニズムを用いた6自由度微動ステージ
―リンク配置の最適設計―
日本機械学会第74期通常総会講演会講演論文集,
大岩 孝彰,平野 正和,宮嶋 俊裕
パラレルメカニズムを用いた6自由度精密運動機構
―リンク配置の最適化設計―
1997年度精密工学会春季大会学術講演会講演論文集,1149-1150(1997).
大岩研究室のホームページへ
Copyright (C) 1997 OIWA Laboratory All Rights Reserved.