6-DOF Fine Motion Stage using PZT Actuators
Optimum Link Layout Design
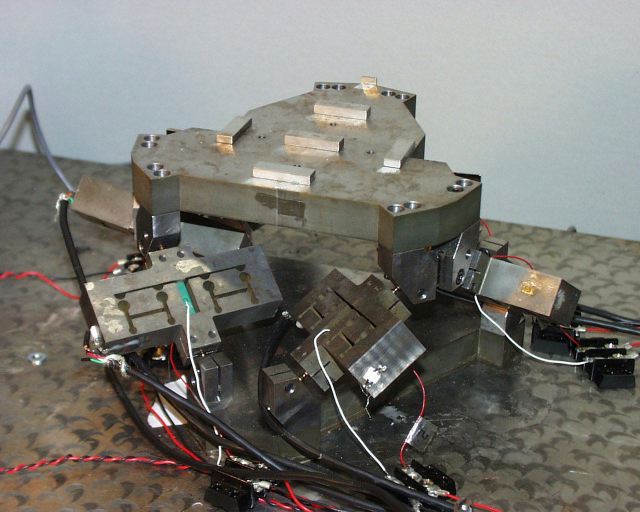
This paper describes a link layout design problem for six degree-of-freedom fine motion stage using Stewart platform mechanism. Isotropies of the translational and rotational stiffness, the generated force of the stage, the force acting on the link and the positioning resolution are investigated by singular value decomposition in various link layout. The obtained main results are as follows. (1) The translational stage stiffness in XYZ directions is unified at optimum stage height. The height is dependent on position angle difference between the stage joint and the base joint and is independent of the stage radius. (2) The translational positioning resolution, the generated force of the stage and the force acting on the link are unified with optimum stage radius, when the angle between the links and the base plane is 35.23 degree. (3) Optimum relation between the stage height and the stage radius exists to make the rotational stiffness in abg directions equal, when the angle between the links and the base plane is 54.7degree (4) The link layout which unifies simultaneously the translational stiffness and the rotational stiffness has not been found.

This is a six-degree-of-freedom fine motion stage using six PZT actuators. This machanism was made by OIWA Lab.
References
Papers
 Takaaki OIWA
Takaaki OIWA
Error Compensation System for Joints, Links and Mechine Frame of Parallel Kinematics Machines
International Journal of Robotics Research, Vol. 24, No. 12 (2005), pp. 1087-1102.
Proceedings
Return to OIWA Lab. home page
Copyright (C) 1997 OIWA Laboratory All Rights Reserved.
 Takaaki OIWA and Masato TAMAKI
Takaaki OIWA and Masato TAMAKI