パラレル・μCMM
マイクロパーツのためのパラレルメカニズム型小型3次元座標測定機の研究
近年,マイクロマシン技術に代表される微細加工技術や三次元造形加工法の発達により,立体的で複雑な形状を持つ高精度な微小パーツの成形が現実となりつつあります.(例えば例1,および例2)
しかし,これらのパーツは三次元的にその精度評価を行う必要があります.従来このような幾何偏差の測定には直交座標軸を持つ三次元座標測定機(CMM)が用いられてきましたが,サブミクロンからナノメートルオーダの測定にはまったく適していません.そこで,従来の直交座標型CMMを小型化して高分解能化と高精度化を目指したCMMの研究が各所で開始されています.
本研究室では,直交座標型メカニズムではなく,パラレルメカニズムを用いた新しいCMMを提案してきました.このCMMはパラレルメカニズムの持つ特徴により,高精度を実現できると考えられます.そこで,本研究ではこのパラレルメカニズムを用いた小型CMMを開発することを目的としています.
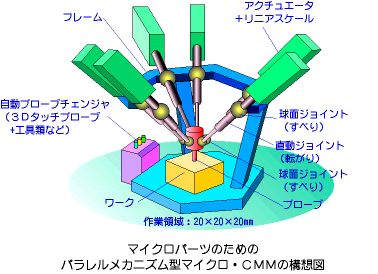
図 本研究で提案するパラレル型μCMMの構想図
上の図は本研究室で提案するパラレル型マイクロ・CMMの概略を示しています.現段階ではスケールとアクチュエータを直動ジョイントに内蔵した3自由度空間パラレルメカニズム(3-rps)と6自由度パラレルメカニズム(Hexapod)の2タイプを考えています.
また,本研究はパラレルメカニズムを高精度な機構に応用するための研究であり,タッチトリガープローブを光等を用いた非接触プローブあるいは工具(切削あるいは放電加工)に持ち換えることにより,さまざまな用途が実現すると考えられます.
3自由度空間パラレルメカニズム(3-rps)によるμCMMの構想図です.

リニアスケール(ストローク100mm,分解能2nm)と圧電素子を用いたインチワーム機構を組み込んだ直動リンクです.
ジョイント部やリンクの弾性変形や熱的伸縮をメカニカルに補正する装置を内蔵しています.

上記の直動リンクをテストするためのテストベッドです.
直動リンクでステージを駆動し,ステージの変位をレーザ干渉測長器で計測します.
この値と内蔵のリニアスケールの読みを比較します.
参考文献 (新しいものから並べてあります)
印刷論文
 山本 俊夫,大岩 孝彰
山本 俊夫,大岩 孝彰
遺伝的アルゴリズムを用いたパラレルメカニズムのリンク配置の最適設計
精密工学会誌,67,10(2001)pp.1652-1656.
口頭発表
 ○大岩孝彰,加本哲也
○大岩孝彰,加本哲也 大岩 孝彰,高橋 良介,光井健二
大岩 孝彰,高橋 良介,光井健二