パラレルメカニズムの高精度化に関する研究
Improvement of Parallel kinematic machine
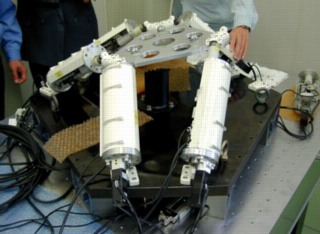
スチュワートプラットフォーム機構(ヘキサポッドとも呼ばれています.図参照)に代表されるパラレルメカニズムは,近年産業用ロボットや工作機械の分野で研究が盛んになりつつあります.
このような閉リンク機構を並列に組み合わせた機構は,従来の積み重ね構造を持つ直交座標型工作機械やアーム型ロボットなどのシリアルメカニズムと比較して,
- 梁構造ではなくトラス構造のため剛性が高い.
- 各軸の質量が累積しないため,移動速度が高い.
- 各軸の位置決め誤差が累積しない(精度平均化).
などの特長により速度・剛性・精度などの面で有利であると言われています.
現在では,多自由度の運動が容易に得られることを利用してドライビングシミュレータやフライトシミュレータなどのアミューズメント関連機器や,高速性を生かしてハンドリングロボットや高速工作機械などへの応用が進められています.
我々の研究室では,このメカニズムが高精度な資質を持っているという点に着目しています.
そこで,本研究では,このパラレルメカニズムを用いて精密な運動機構を実現させるため,
下記のようないくつかのテーマについて研究を行っています.
 パラレルメカニズムにおけるアッベの原理に関する研究
パラレルメカニズムにおけるアッベの原理に関する研究
---> 従来の直交座標型メカニズムでは遵守が困難であったアッベの原理について研究を行っています.
パラレルメカニズムのジョイント・リンクおよびフレーム部の熱的伸縮および弾性変形誤差補正システム
---> パラレルメカニズムの特長を利用し,高精度なメカニズムを実現します.
6自由度パラレルメカニズムの校正に関する研究
--->ジョイントの位置・姿勢やリンクの初期長さなどの機構パラメータを推定するキャリブレーションの研究を行っています.
積層型圧電素子をアクチュエータとした6自由度微動機構
---> 剛性と運動特性を各方向で等方化したリンク配置を持つ微動ステージの開発を行っています.
実験装置の数々
(上のリンク先にも各種あります)

機構パラメータを推定する,つまりキャリブレーションの基礎的研究に用いているヘキサポッドです.
Stewart machanism for study of kinematic calibration of HEXAPOD.

静岡県産学協同研究で開発中のヘキサポッド(静岡工業技術センター,榎本工業との3者でH12〜14共同研究中)
大岩研究室のホームページへ
Copyright (C) 1997 OIWA Laboratory All Rights Reserved.