ワーク・ツール間の6自由度完全相対運動を目指した超精密機械の開発
本研究では,機械の運動を乱す内・外乱例えば内外力や室温変動などの影響を排除・低減するために,工作物(ワーク)とツール(刃物,プローブなど)の間の6自由度相対運動(位置・姿勢)をパラレルメカニズムを用いてインプロセス計測し,機械の運動を補正する新しい概念の機械を創製します.
図 本研究で提案する機械の概念図
上の図は本機械の概念を示しています.工作物が搭載される定盤から見たツールの6自由度相対運動を計測するために,図のように定盤上に6自由度パラレルメカニズム(ヘキサポッド)のベースプラットフォームを,ツール主軸にムービングプラットフォームを設置します.このパラレルメカニズムにはアクチュエータを組み込まないで受動的なメカニズムとし,ツールと工作物の相対運動は既存の機械(直交座標型,非直交座標型を問わない)のアクチュエータを用いて行いいます.以上のパラレルメカニズムによりリアルタイムで計測された6自由度相対運動(位置および姿勢)から6方向の運動誤差を算出し,既存の機械のアクチュエータを制御します.座標測定機などに応用する場合は,ツールの物理的な位置補正を行う必要がなく,計測した6自由度相対運動がそのまま測定値となります.
左図 従来の機械では,切削力などの外力や構造体の熱変形により,ツールと工作物の相対位置誤差が発生してしまいます.
右図 提案する機械システムではツールと工作物の相対運動を計測し,機械をフィードバック制御します.
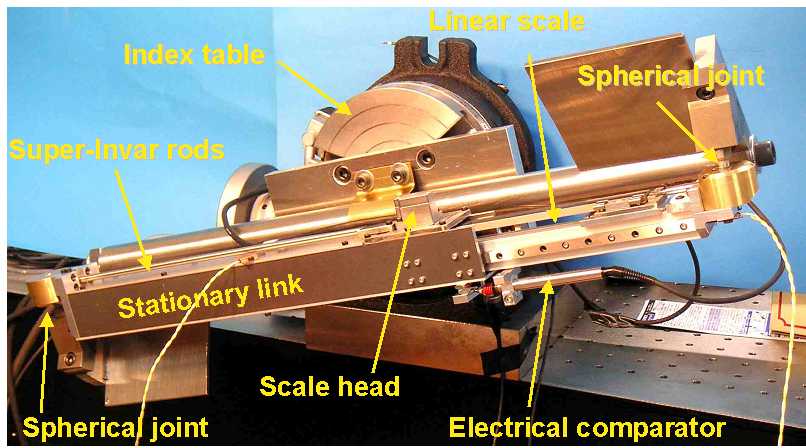
図 両端に球面ジョイントを持つヘキサポッド用の伸縮可能な受動連結連鎖(ストラット)1本です.リニアスケールを内蔵して長さ変化を高精度に計測します.ジョイントの回転誤差,弾性変形およびリンクの熱的な膨張を補正する機構を内蔵しています .
図 一般的な直交座標形のXYZメカニズムの定盤と主軸の間にヘキサポッド機構を組み込み,相対運動を計測します(製作中)

図 製作中の直交座標形メカニズムです

Figure ストローク270mmを持つインクリメンタル式リニアエンコーダ(ハイデンハイン社製)を内蔵した受動形連結連鎖です.
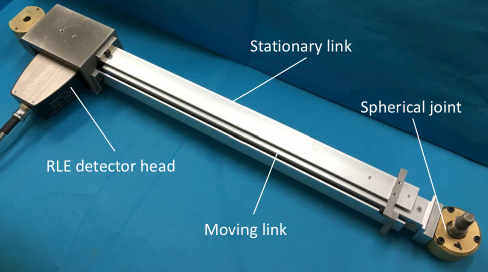
Figure レニショー社製レーザエンコーダ(レーザ干渉測長方式)を内蔵した受動形連結連鎖です.
参考文献
(新しいものから並べてあります)
印刷論文
 Takaaki Oiwa
Takaaki Oiwa
Ultra-precise machine system using hexapod-type measurement device for six-degree-of-freedom relative motions between tool and workpiece
International Journal of Precision Engineering and Manufacturing.
口頭発表
Baris Celik, Takaaki Oiwa and Junichi Asama:
Design and Development of Two-degree-of-freedom Parallel Manipulator for Tilting Laser Interferometry Tracking System,
The 7th International Conference of Asian Society for Precision Engineering and Nanotechnology(ASPEN2017), Seoul, Korea Nov.16, 2017.
大岩孝彰,中澤行雄, 寺林賢司,朝間淳一:
ワーク・ツール間の6自由度相対運動計測と補正に基づく精密機械システム―レーザ干渉計を内蔵した長さ計測用受動連結連鎖―,
精密工学会秋季大会学術講演会,2017.9,大阪大学
Baris Celik, Takaaki Oiwa, Kenji.Terabayashi1 and Junichi Asama:
Two-degree-of-freedom special parallel manipulator for laser interferometry-based tracker,
The Fourth Conference on Mechanisms, Transmissions and Applications(MeTrApp2017), Trabzon, Turkey, July 3-5, 2017.
中澤行雄,大岩孝彰,寺林賢司,朝間淳一:
レーザ干渉測長器を内蔵したパラレルメカニズム用受動形連結連鎖の開発,
日本機械学会東海支部第66期総会・講演会講演論文集('17.3.14-15)No. 173-1 pp.218.(静岡大学浜松キャンパス)
Yukio NAKAZAWA, Takaaki OIWA, Kenji TERABAYASHI and Junichi ASAMA:
Measurement stability improvement of passive extendable strut equipped with laser interferometer length measurement system,
16th International Conference on Precision Engineering(ICPE2016),Hamamatsu, Japan P03-8160.
Yukio NAKAZAWA, Takaaki OIWA, Kenji TERABAYASHI and Junichi ASAMA:
Measurement stability improvement of passive extendable strut equipped with laser interferometer length measurement system,
The 7th International Conference on Positioning Technology (ICPT 2016),Seoul, Korea, p49, Nov.8-11, 2016.
大岩孝彰,清水 真,寺林賢司,朝間淳一:
ワーク・ツール間の6自由度相対運動計測と補正に基づく精密機械システム ―パラレルメカニズムの連結連鎖の長さ計測精度評価―,
2016年度精密工学会秋季大会学術講演会講演論文集,茨城大学水戸キャンパス,(2016),pp.733-734.
Takaaki Oiwa, Kazuki Kobayashi, Kenji Terabayashiand Junichi Asama
A Precision Machine System with Hexapod Device to Measure Six-degree-of-freedom Relative Motions between Tool and Workpiece
The 19th International Conference on Mechatronics Technology ICMT2015, November27-30, 2015, Tokyo, Japan.
Takaaki Oiwa, Kazuki Kobayashi, Kenji Terabayashiand Junichi Asama
Ultra-precision machine system feedback-controlled with hexapod-type measurement device for six-degree-of-freedom relative motions between tool and workpiece
Mechatronics2015,Warsaw, Poland, Sep. 21-23, 2015
○中澤行雄,大岩孝彰,寺林賢司,朝間淳一:
ワーク・ツール間の6自由度完全相対運動を目指した超精密機械の開発 (第4報)(レーザ干渉計を内蔵した連結連鎖の計測安定性),
日本機械学会 2015年度年次大会,S1110504,北海道大学,9/13-16,S1110504
大岩孝彰,小林一輝,寺林賢司,朝間淳一
ワーク・ツール間の6自由度相対運動計測と補正に基づく精密機械システム ―パラレルメカニズムの連結連鎖の長さ計測評価装置―
2015年度精密工学会秋季大会学術講演会,東北大学
中澤行雄,大岩孝彰,寺林賢司,朝間淳一
ワーク・ツール間の6自由度完全相対運動を目指した超精密機械の開発 (第4報)(レーザ干渉計を内蔵した連結連鎖の計測安定性)
日本機械学会 2015年度年次大会,S1110504,北海道大学
Kazuki KOBAYASHI, Takaaki OIWA, Junichi ASAMA and Kenji TERABAYASHI
Investigation on accuracy improvement in hexapod-type measurement device for six degree-of-freedom relative motions (P2-29MS)
, pp434-436, The 6th International Conference on Positioning Technology ICPT2014, Nov. 18-21, 2014, Kitakyushu International Conference Center, Kitakyushu-shi, Fukuoka, Japan
Takaaki OIWA, WenBo YAO and Junichi ASAMA
Ultra-precision machine system feedback-controlled using hexapod-type measurement device for six-degree-of-freedom relative motions between tool and workpiece
euspen 10th Int. Conf. and Exhibition on Laser Metrology, Machine Tool, CMM & Robotics Performance (Lamdamap 2015, euspen) pp. 69-78, 2013, UK.
Takaaki Oiwa
Ultra-precision machine feedback-controlled using hexapod-type measurement device for six-degree-of-freedom relative motions between tool and workpiece
7th International Conference Mechatronics 2007, (2007.9) Warsaw, Poland.
Takaaki Oiwa
Ultra-precision machine tool or coordinate measuring machine using hexapod-type measurement device for six degree-of-freedom relative motions between cutting tool/probe and workpiece
12th IFToMM world congress, (2007.6) Besancon, France.
Takaaki Oiwa
Ultra-precise machine with six-degree-of-freedom perfect relative motion between tool and workpiece
International Symposium on Flexible Automation, (2006.7) Osaka.
大岩孝彰
ワーク・ツール間の6自由度完全相対運動を目指した超精密機械の開発
(第3報)―受動的な連結連鎖の性能―
日本機械学会第6回機素潤滑設計部門講演会,(5/29-30,松島温泉ホテル大観荘)
Takaaki Oiwa
Ultra-precise Machine System Using Hexapod-type Measurement Device for Six-Degree-of-Freedom Relative Motions Between Tool and Workpiece
Proceedings of the 5th Chemnitz Parallel Kinematics Seminar, (April 25-26, 2006 Chemnitz, Germany)
Takaaki Oiwa
Ultra-precise Machine with 6-DOF Perfect Relative Motion between Tool and Workpiece
KSME-JSME Joint Int. Conf. on Manufacturing, Machine Design and Tribplogy, (June 23, 2005 Korea, Seoul) DLM-305-1-4
大岩研究室のホームページへ
Copyright (C) 1997 OIWA Laboratory All Rights Reserved.
 大岩孝彰,辰ノ歴識
大岩孝彰,辰ノ歴識